サービス概要
データ分析・機械学習
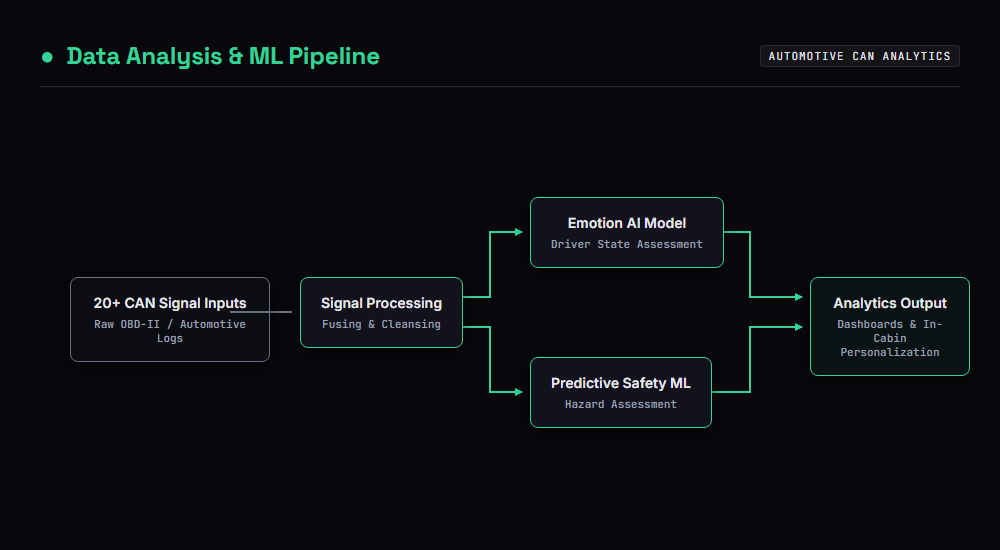
FPT Automotiveのデータ分析・機械学習(eda-and-ml)サービスは、車両データと設計図面を実用的なインサイトに変換します。カメラ不使用の予測安全(3〜15秒前の危険予測)、ドライバーの感情コンテキスト検知(Qualcomm SoC上で18.7倍の推論高速化)、EVテレメトリ予測診断(MLP+XGBoost+LLaMAによるバッテリー診断)、ネジ自動検査(1ドア2秒)や部品図面自動検証(時間70%短縮)などの領域を網羅します。
18.7倍
Qualcomm推論高速化
3-15秒
CAN予測安全警告時間
70%
図面レビュー準備削減
2秒
ドアネジAI検査時間
35%
MBD自動化手動工数削減
機能
主な機能
プライバシーファーストアーキテクチャ
すべての分析は車内で完結し、機密情報をクラウドサーバーに送信しない。
CAN信号解析
自動車CANバスデータで訓練されたディープラーニングモデルによる予測的洞察。
異常検知
通常でない車両挙動や潜在的障害の自動識別。
予知保全
部品障害を発生前に予測し、ダウンタイムと保守コストを削減。
フリート分析
車両フリート全体の集計インサイトで運用最適化を実現。
技術
技術スタック
| Component | Technology | Purpose |
|---|---|---|
| データ収集 | CAN-bus Interface | 車両信号取得 |
| 処理 | Python, Pandas | データ準備と分析 |
| MLモデル | TensorFlow, PyTorch | 予測モデリング |
| 分析 | Scikit-learn, XGBoost | 統計分析 |
| 可視化 | Tableau, Grafana | ダッシュボードとレポーティング |
ユースケース
実際の活用事例
実際の導入から記録された成果。
事故防止のための予測安全レイヤー
CANバスダイナミクス分析により、潜在インシデントの3〜15秒前に高リスク運転シナリオを予測。追突事故の29%を占めるドライバー不注意を対象とし、カメラなしで監視。
Before
受動型ADASでは細かな不注意リスクを予測できず。不注意による追突事故が29%発生
After
3〜15秒前からの積極的リスクアラートで、モニタリングから積極的介入へ橋渡し
ドライバー感情コンテキストAIシステム
Qualcomm SA8255P SoC上で20以上のCAN信号とドライバー行動データを融合するフルスタックAIソリューション。リアルタイムの感情コンテキスト理解と車内パーソナライゼーションを実現。
Before
リアルタイムのドライバー状態理解なし。複雑なマルチシグナル融合が未解決
After
≤100msで継続的推論。精度5.99%向上、再現率49.15%向上を実現
AIドアパネル検査 — 3分から2秒へ
自動車ドアパネルのネジ検査を自動化する機械学習モデル。不具合パターンで訓練され、生産ワークフローに統合。ドアごとに即座に合否判定を返す。
Before
大量ラインでのスループットを制限する1ドアあたり3分の手動検査
After
AI検査が1ドア2秒で99.7%の精度を達成
EV向けAI予測診断
MLP、XGBoost、LLaMAを組み合わせたマルチモデル診断システム。リアルタイムコネクテッドビークルデータ(センサー、シャーシ、タイヤPSI、バッテリー)を取り込み、予測DTCとバッテリー健全性分析を会話型インターフェースで提供。
Before
事後対応型診断のみ。生センサーデータの解釈に専門家が必要
After
予測的障害警告とバッテリー診断を自然言語で車両オーナーに提供
AI部品図面レビュー — セットアップ時間70%削減
YOLO/Faster R-CNN、OCR、トランスフォーマーモデルを組み合わせたディープラーニングパイプライン。自動車エンジニアリング図面の寸法誤差、公差違反、注釈不整合を自動検出。
Before
図面1枚あたり数時間の専門家による手動レビュー。複雑なマルチビュー図面では見落としのリスク
After
カラーコードマークアップ、重大度分類エラーレポート、コンプライアンスダッシュボードによる自動レビュー
進め方
実装アプローチ
Phase 1: データ戦略・収集
- データ収集戦略とプライバシー要件を定義
- CANバスデータ収集インフラをセットアップ
- データガバナンスとセキュリティプロトコルを確立
Phase 2: モデル開発
- 過去の車両データを分析
- 主要ユースケース向け予測モデルを開発
- モデルの精度とパフォーマンスを検証
Phase 3: 統合・デプロイ
- フリート管理システムとモデルを統合
- 車両フリートへ展開
- モニタリングとアラートシステムをセットアップ
Phase 4: 最適化・スケール
- 本番環境でのモデルパフォーマンスを監視
- フィードバックを収集してモデルを改善
- 追加の車両プラットフォームへスケール
関連サービス