サービス概要
フィジカルAI
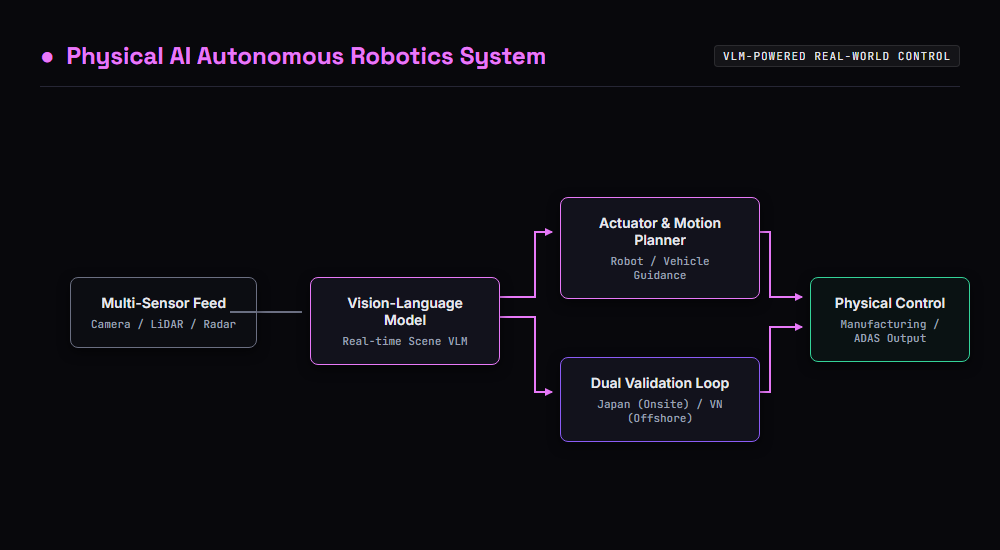
FPT AutomotiveのフィジカルAI(physical-ai)サービスは、自動運転とロボティクス向けの高度な具現化AI(Embodied AI)の実装と検証を支援します。RealSenseを用いたロボット操作データ収集(フェーズ0:250エピソード)や、同一条件下でのπ0.5およびGR00Tモデルの評価フレームワーク(把握・移送・設置成功率)の確立、CANバス予測安全モデル、そして100% Model Garden統合・BigQuery管理のイベント駆動型Vertex AIパイプラインを構築します。
250
ロボットエピソード収集数
100%
Model Garden統合率
3-15秒
CAN危険事前予測時間
<2回
1,000kmあたり誤警報数
二拠点
日越オンサイト・オフショア
機能
主な機能
マルチモーダル認識
視覚・LiDAR・レーダーの融合で包括的な環境理解と物体検出を実現。
リアルタイムシーン理解
セマンティックセグメンテーションとシーン解釈で複雑な環境での知的な意思決定を可能に。
自律ナビゲーション
自律走行車とモバイルロボット向けのインテリジェントな経路計画と障害物回避。
ロボット操作
ロボットアームと製造システムの精密制御と意思決定。
エッジベース推論
クラウド依存なしにリアルタイム自律動作を可能にする100ms以下のレイテンシ推論。
技術
技術スタック
| Component | Technology | Purpose |
|---|---|---|
| ビジョン | VLM, Computer Vision | シーン理解 |
| センサー融合 | LiDAR, Radar, Camera | マルチモーダル認識 |
| ロボティクス | ROS, Motion Planning | ロボット制御とナビゲーション |
| エッジコンピューティング | NVIDIA Orin, Qualcomm | リアルタイム推論 |
| 開発 | Python, C++, CUDA | 実装 |
ユースケース
実際の活用事例
実際の導入から記録された成果。
ロボット操作データ収集・ベンチマーク
4台のIntel RealSense D405カメラを使用した12自由度ロボットアームの包括的データ収集プロトコル。N=30試行の構造化成功率フレームワーク(全体SR、把握SR、移送SR、設置SR)で、π0.5とGR00Tモデルのベンチマーク基盤を確立。
Before
厳密なデータプロトコルなし、標準評価フレームワークなし。以前の取り組みでは1,500エピソードで推論精度70%以下
After
再現可能なSR評価フレームワークとフェーズ分離要件で250の高品質エピソードを収集
イベント駆動型Vertex AIトレーニングパイプライン
4段階シーケンシャルステップとModel Garden 100%統合のEventarc起動型Vertex AIパイプライン。BigQueryバックのログをラン単位とステップ単位の2カテゴリに分けて即時診断を可能に。AWS S3とGCSのクロスクラウドデータ取り込みに対応。
Before
AWS S3とGCP間でパイプライン可視性が分散。再現性と根本原因分析が低速
After
データアップロードトリガーから4ステップパイプラインが自動実行。全ログをBigQueryでSQL照会可能
進め方
実装アプローチ
Phase 1: 認識システム設計
- センサー構成と配置を定義
- マルチモーダル融合アーキテクチャを設計
- エッジコンピューティングインフラを計画
Phase 2: モデル開発
- シーン理解向けVLMモデルを開発
- 物体検出・セグメンテーションモデルをトレーニング
- エッジハードウェア向けにモデルを最適化
Phase 3: 統合・テスト
- 車両・ロボット制御システムと統合
- 目標環境で実世界テストを実施
- 安全性とパフォーマンス指標を検証
Phase 4: デプロイ・最適化
- 自律走行車・ロボットフリートへ展開
- パフォーマンスを監視しデータを収集
- 実世界データに基づいてモデルを継続改善
関連サービス