Service Overview
In-Cabin AI Agent
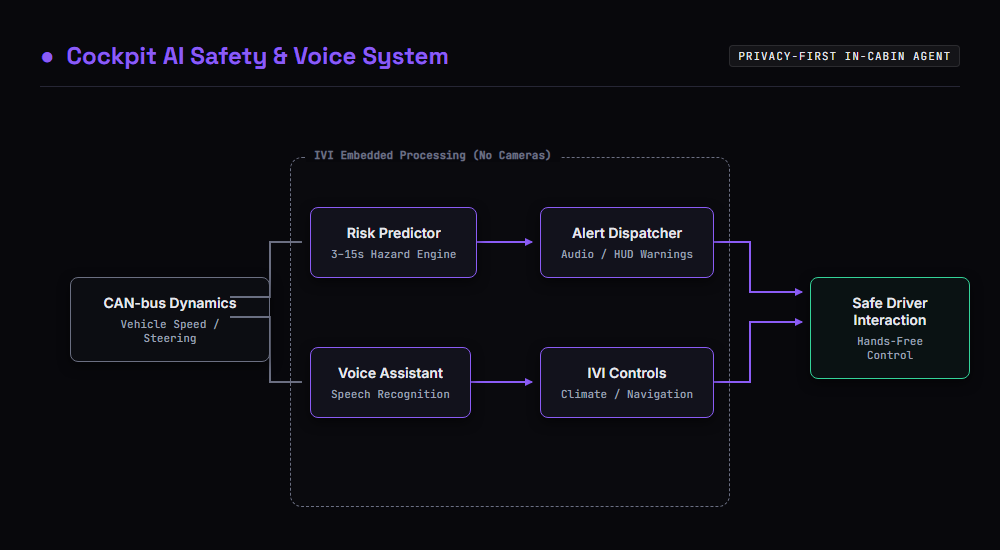
FPT Automotive's cockpit-ai combines predictive safety from CAN-bus analysis and AI-driven voice interaction with a production-ready orchestration layer for heterogeneous hardware. Deployed on Android Automotive and QNX, it runs on-edge VAD, ASR, semantic search, and TTS on resource-constrained SoCs, resolving simple commands in 1.2s and escalating to Azure OpenAI for complex queries. Anticipates high-risk driving 3–15 seconds before escalation without cameras, ensuring privacy.
1,241ms
Edge command path
4,596ms
Cloud path latency
3.06×
Faster than Tier-1 system
3-15s
CAN hazard pre-warning
≥0.85
Decider confidence gate
Capabilities
Key capabilities
Driver Attention Monitoring
Real-time tracking of driver attention levels, fatigue detection, and alertness assessment.
Occupant & Gesture Recognition
Non-camera occupant detection and gesture-based vehicle control — preserving driver privacy.
Natural Language Voice Commands
Context-aware voice assistant that understands driver intent and controls vehicle functions.
Personalized User Profiles
System learns individual driver preferences and auto-adjusts climate, seat position, and entertainment.
Safety-Critical Design
ASIL-compliant system design meeting automotive industry safety standards.
Technology
Technology stack
| Component | Technology | Purpose |
|---|---|---|
| Monitoring | CAN-bus Analysis, Machine Learning | Driver attention and hazard prediction |
| Voice Processing | NLP, Speech Recognition | Voice command understanding |
| Integration | IVI Platform, Cluster, HUD | Cockpit system integration |
| Personalization | Machine Learning | User preference learning |
| Safety | ISO 26262 Alignment | Safety-critical design |
Use cases
Real-world applications
Documented outcomes from actual deployments.
Hybrid Voice AI — 7.5s to 1.2s Latency Cut
Hybrid edge-cloud voice pipeline on Telechips Dolphin-5 SoC. Simple commands resolved on-device in 1,241ms; complex conversational queries escalated to Azure OpenAI GPT-4o-mini and returned in under 5s. No raw audio leaves the vehicle.
Before
Cloud-heavy multi-agent routing stacked 7.5s total latency — real-time interaction and the 4s KPI were mathematically impossible
After
Edge path at 1,241ms; cloud path at 4,596ms meeting the 5s target; 3.06× faster than prior Tier-1 optimized system
How we work
Implementation approach
Phase 1: Requirements & Integration Planning
- Define cockpit integration requirements
- Analyze existing IVI/Cluster/HUD systems
- Plan DMS/OMS sensor placement and calibration
Phase 2: System Development
- Develop driver monitoring algorithms
- Train occupant detection models
- Build voice assistant with automotive context
Phase 3: Integration & Validation
- Integrate with vehicle cockpit systems
- Conduct safety-critical testing (ASIL compliance)
- Validate across different driver profiles
Phase 4: Deployment & Optimization
- Deploy to vehicle fleet
- Collect user feedback and performance data
- Continuously improve based on real-world usage
Explore more
Related services
AI Chatbot
LLM-powered conversational AI for automotive user support, MBD engineering, factory operations, and warranty classification.
Edge AI
Low-latency, privacy-first on-device AI for driver monitoring, hybrid voice, and smart manufacturing.
Data Analysis & ML
Predictive safety, driver context on Qualcomm, EV diagnostics, and drawing reviews powered by ML.