Service Overview
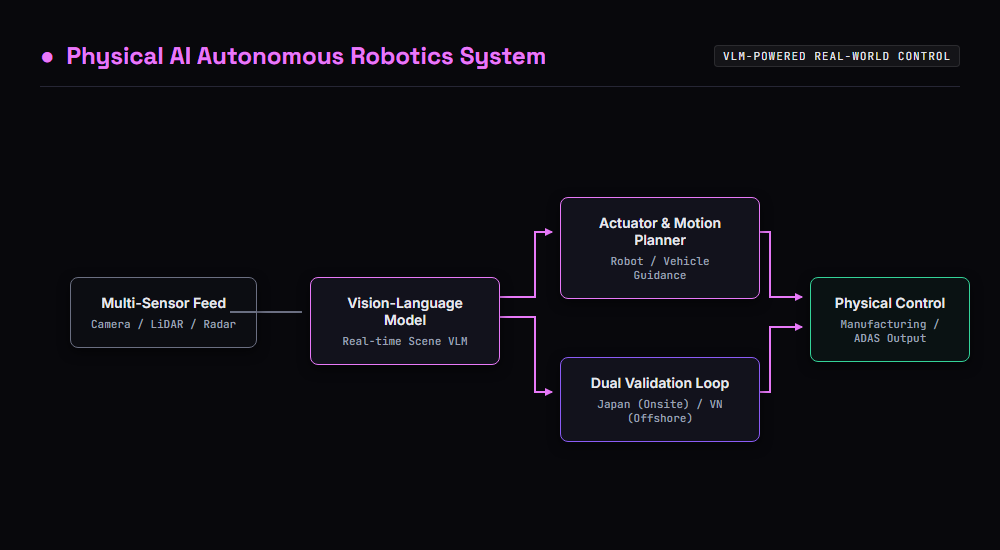
Physical AI
FPT Automotive's physical-ai service implements and validates advanced embodied AI for autonomous driving and robotics. We support OEM roadmaps through structured robot manipulation data collection (Phase 0 RealSense, 250 episodes), a Success Rate evaluation framework (Total, Grasp, Transport, Place SR) to benchmark π0.5 and GR00T under identical conditions, and predictive safety models. Powered by an event-driven Vertex AI pipeline with 100% Model Garden integration and BigQuery logs.
250
robot episodes collected
100%
Model Garden integration
3-15s
CAN hazard pre-warning
<2
false alarms per 1,000km
Dual
Onsite-offshore robot ops
Capabilities
Key capabilities
Multi-Modal Perception
Fusion of vision, LiDAR, and radar for comprehensive environmental understanding and object detection.
Real-Time Scene Understanding
Semantic segmentation and scene interpretation enabling intelligent decision-making in complex environments.
Autonomous Navigation
Intelligent path planning and obstacle avoidance for autonomous vehicles and mobile robots.
Robotic Manipulation
Precise control and decision-making for robotic arms and manufacturing systems.
Edge-Based Inference
Sub-100ms latency inference enabling real-time autonomous operation without cloud dependency.
Technology
Technology stack
| Component | Technology | Purpose |
|---|---|---|
| Vision | VLM, Computer Vision | Scene understanding |
| Sensor Fusion | LiDAR, Radar, Camera | Multi-modal perception |
| Robotics | ROS, Motion Planning | Robot control and navigation |
| Edge Computing | NVIDIA Orin, Qualcomm | Real-time inference |
| Development | Python, C++, CUDA | Implementation |
Use cases
Real-world applications
Documented outcomes from actual deployments.
Robot Manipulation Data Collection & Benchmarking
End-to-end data collection protocol for a 12-DoF robot arm using 4 Intel RealSense D405 cameras. Structured Success Rate framework (Total, Grasp, Transport, Place SR) with N=30 trials per set — establishing the baseline to benchmark π0.5 and GR00T models.
Before
No rigorous data protocol, no standardized evaluation framework; earlier effort yielded <70% inference accuracy with 1,500 episodes
After
250 high-quality episodes collected with a reproducible SR evaluation framework and phase-separated requirements
Event-Driven Vertex AI Training Pipeline
Eventarc-triggered Vertex AI pipeline with 4 sequential steps and 100% Model Garden integration. BigQuery-backed logs split into run-level and step-level categories for immediate diagnostics. Cross-cloud ingress from AWS S3 and GCS.
Before
Pipeline visibility fragmented across AWS S3 and GCP; reproducibility and root-cause analysis slow
After
4-step pipeline auto-executes from data upload trigger; all logs SQL-filterable in BigQuery
How we work
Implementation approach
Phase 1: Perception System Design
- Define sensor configuration and placement
- Design multi-modal fusion architecture
- Plan edge computing infrastructure
Phase 2: Model Development
- Develop VLM models for scene understanding
- Train object detection and segmentation models
- Optimize models for edge hardware
Phase 3: Integration & Testing
- Integrate with vehicle/robot control systems
- Conduct real-world testing in target environments
- Validate safety and performance metrics
Phase 4: Deployment & Optimization
- Deploy to autonomous vehicle/robot fleet
- Monitor performance and collect data
- Continuously improve models based on real-world data
Explore more
Related services
Edge AI
Low-latency, privacy-first on-device AI for driver monitoring, hybrid voice, and smart manufacturing.
Data Analysis & ML
Predictive safety, driver context on Qualcomm, EV diagnostics, and drawing reviews powered by ML.
System Test AI
AI-assisted end-to-end vehicle validation and HIL/SIL simulation compliance.